|
Страница 2 из 3 Более приемлемая стратегия показана на рис. 25.17 и 25.18. На рис. 25.17 приведен пример того, как робот намеренно направляет свое движение в определенную сторону от отверстия. Условия выполнения команды движения показаны на рисунке, а проверкой окончания движения становится контакт с любой поверхностью. На рис. 25.18 показано, что выдается команда движения, которая вынуждает робота передвигать колышек, скользящий по поверхности, до его попадания в отверстие. Тем самым предполагается использование команды приспособляемого движения. Поскольку все возможные скорости в огибающей движения направлены влево, робот должен передвинуть скользящий по поверхности колышек вправо после вступления его в контакт с горизонтальной поверхностью. Вслед за прикосновением колышка с правой вертикальной стенкой отверстия колышек должен проскользнуть вниз, поскольку все возможные скорости направлены вниз относительно этой вертикальной поверхности. Колышек будет продолжать двигаться до тех пор, пока не достигнет дна отверстия, поскольку именно таково условие завершения этого движения. Несмотря на неопределенность управления, все возможные траектории движения робота оканчиваются контактом с дном отверстия, разумеется, при условии, что не обнаружатся какие-либо дефекты поверхности, из-за которых робот не сможет сдвинуть с места застрявший колышек. 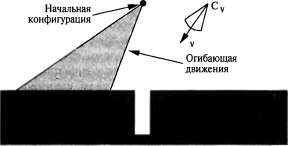 Рис. 25.17. Первая команда движения и полученная в итоге огибающая возможных движений робота. Независимо от любых погрешностей, известно, что в окончательной конфигурации колышек будет находиться слева от отверстия Рис. 25.18. Вторая команда движения и огибающая возможных движений. Даже при наличии погрешностей колышек в конечном итоге оказывается в отверстии Вполне очевидно, что задача конструирования планов тонких движений не тривиальна; в действительности она намного сложнее по сравнению с задачей планирования в условиях точных движений. Для решения этой задачи можно либо выбирать постоянное количество дискретных значений для каждого движения, либо использовать геометрию среды для выбора направлений, позволяющих определить качественно иное поведение. Планировщик тонких движений принимает в качестве входных данных описание пространства конфигураций, угол наклона конуса неопределенности скоростей и спецификацию возможных сенсорных восприятий, определяющих ситуацию завершения (в данном случае — контакт с поверхностью). В свою очередь, планировщик должен выработать многоэтапный условный план (или политику), позволяющий добиться гарантированного успеха, если подобный план существует.
|
